- キーワードの概要:パレットやカゴ車に積まれた荷物を自動で降ろすロボットのことです。従来は人の手で行っていた重労働を、3DカメラやAI技術を使って自動化します。事前の設定が不要で、バラバラに積まれた荷物にも対応できるのが特徴です。
- 実務への関わり:物流センターの入荷作業における人手不足の解消や、重い荷物を持つことによる腰痛などの労災防止に直結します。手作業によるトラックの待機時間を減らし、物流2024年問題への対策としても大きな効果を発揮します。
- トレンド/将来予測:AIと3D認識技術の進化により、様々な形や重さの荷物を混載した状態でも正確に降ろせるようになっています。今後は人間と同じ空間で安全に働ける協働ロボットの普及や、他の自動化設備との連携がさらに進むと予想されます。
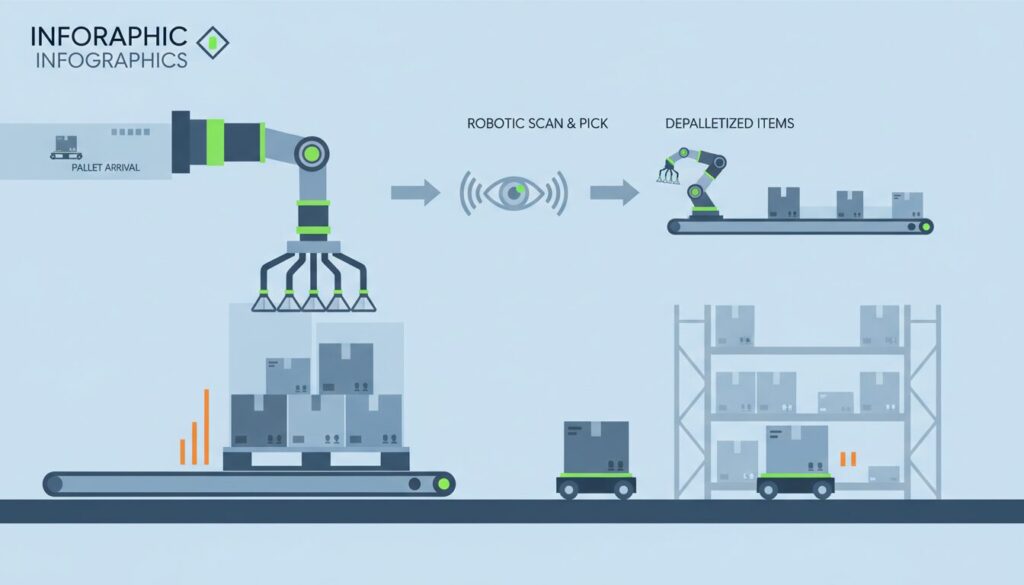
物流2024年問題が本格化し、トラックの待機時間削減が急務となる中、入荷バースでのボトルネック解消が物流センター運営の死命を制する事態となっています。コンベヤや自動仕分け機(ソーター)、AGV(無人搬送車)による庫内の「物流自動化」が目覚ましい進歩を遂げる一方で、これまで最後まで人の手に依存してきたのが、パレットやカゴ車から荷物を降ろす「デパレタイズ(荷下ろし)」工程です。なぜ今、この工程の自動化が急務であり、どのような技術革新が現場の課題を解決するのか。本記事では、最新の知能ロボットの仕組みから、導入時の実務的な落とし穴、組織的課題の解決策、そして投資対効果(ROI)の算出方法に至るまで、物流実務の最前線の視点から詳細に紐解いていきます。
- 深刻化する物流課題の切り札「デパレタイズロボット」とは?
- デパレタイズとパレタイズロボットの違い
- 現場が直面する「重筋作業」と「人手不足」の限界
- デパレタイズを完全自動化する「知能ロボット」の3つのコア技術
- 3Dビジョンによる高精度認識と「ティーチングレス」
- ランダム・混合積みに対応するAIアルゴリズム
- 荷物に合わせて進化する「ロボットハンド」の種類
- 自社に最適なシステムを選ぶ!実践的な5つの選定チェックポイント
- ① 対象物の仕様(重量・材質・コンテナ)と目標タクトタイム
- ② 設置スペースの制約と「協働ロボット」という選択肢
- ③ ロボット単体ではなく「周辺設備」との連携設計
- ④ 例外処理(エラーハンドリング)とマニュアル動線の設計
- ⑤ 保守・メンテナンスとベンダーサポート体制
- 経営層を説得する「費用対効果(ROI)」と導入コストの考え方
- デパレタイズシステムの価格相場とコスト内訳
- 人件費削減・労災防止効果を数値化するROIシミュレーション
- 失敗しない物流自動化への導入ロードマップと成功事例
- 現状分析から要件定義、テスト(PoC)までの確実なステップ
- DX推進時の組織的課題とチェンジマネジメント
- 【業界別】食品・化学・物流センターでのデパレタイズ成功事例
深刻化する物流課題の切り札「デパレタイズロボット」とは?
デパレタイズとパレタイズロボットの違い
物流倉庫の自動化を検討する際、経営層や他部門との間で用語や認識の混同が起きやすいため、まずは「デパレタイズ(荷下ろし)」と「パレタイズ(積み付け)」の決定的な違いを整理します。両者は動作の方向が逆であることはもちろんですが、現場導入時に直面する「技術的ハードルの高さと不確実性」が根本的に異なります。
パレタイズロボットは、WMS(倉庫管理システム)や生産ラインのPLCから送られる確定データに基づき、決められたパターン通りに荷物を積んでいく「正解がある作業」です。一方、デパレタイズは現場特有の「不確定要素の塊」に立ち向かう必要があります。海外コンテナからのデバンニング時によく見られる荷崩れ、シュリンクラップによる光の乱反射、長時間の輸送や湿気による段ボールの変形など、事前の想定が通用しないケースが日常茶飯事です。特に、複数品種がランダムに積まれた「混合積み(混載パレット)」の荷下ろしは、従来のプログラム制御の産業用ロボットでは到底対応不可能とされてきました。
この限界を打破したのが、高度な「3Dビジョン」と「AI(人工知能)」を搭載した「知能ロボット」の登場です。事前に荷物のサイズや重量、柄をシステムに登録する膨大な手間を省く「マスターレス」技術や、現場での煩雑な動作設定作業を極限までゼロに近づける「ティーチングレス」での運用が可能になったことで、物流センターの入荷バースにおける実用化が一気に進みました。
| 比較項目 | パレタイズ(積み付け) | デパレタイズ(荷下ろし) |
|---|---|---|
| 対象物の状態 | 整った状態(コンベヤ上で姿勢制御済) | 乱雑な状態(荷崩れ、ズレ、混合積み、ラップ巻き) |
| コアとなる技術 | 高速・正確な動作制御、パターン計算 | 3Dビジョンによる空間認識、AI画像処理、把持戦略計算 |
| 事前準備の負荷 | 品種ごとのティーチングやマスター登録が必要 | マスターレス・ティーチングレス運用が主流 |
| システムとの連携 | 生産・出荷データに基づく制御が必須 | カメラ認識のみの自律稼働(スタンドアローン)も可能 |
現場が直面する「重筋作業」と「人手不足」の限界
物流センターのセンター長や製造現場のライン長が最も頭を抱えているのが、過酷な重筋作業に伴う労災リスクと、それに起因する慢性的な人手不足、そして事業継続計画(BCP)の脆弱性です。
例えば、真夏の密閉されたコンテナ内での荷下ろしや、20kgを超える飲料・化学原料などの重量物を延々とハンドリングする作業は、作業員の深刻な腰痛リスクを急増させます。労働安全衛生の基準が年々厳格化する中、一度労災が発生すればラインは停止し、労働基準監督署の指導が入り、貴重な熟練人材は離職してしまいます。その後の穴埋めにかかる割高な派遣費用や採用コストは跳ね上がり、収益を大きく圧迫する悪循環に陥ります。
こうした背景から、デパレタイズロボットは単なる「作業の省人化ツール」ではなく、物流網を止めないための「事業継続の要(インフラ)」として再評価されています。最低賃金の引き上げや「物流2024年問題」によるトラックドライバーの待機時間削減義務化といった外的要因も重なり、設備投資の「ROI(投資対効果)」の考え方は数年前と比較して急速に改善・正当化されつつあります。
デパレタイズを完全自動化する「知能ロボット」の3つのコア技術
深刻な人手不足と重筋作業の負担軽減を背景に導入が進むデパレタイズロボットですが、単に決められた座標への移動を繰り返す従来の産業用ロボットとは一線を画し、自ら状況を判断して動く「知能ロボット」へと進化を遂げています。設備投資のROIを最大化するためには、この知能を支えるコア技術の仕組みを正しく理解し、自社の現場に適合するかを見極めることが不可欠です。本セクションでは、運用を根底から変革する3つの技術を現場視点で解き明かします。
3Dビジョンによる高精度認識と「ティーチングレス」
従来のロボット導入において現場が最も疲弊していたのが、品種ごとの「マスター登録」と「ティーチング(動作教示)」作業でした。商品の外装が期間限定パッケージに変わっただけでエラーが頻発し、その都度ラインを止めて設定をやり直す光景は珍しくありません。最新の知能ロボットは、3Dビジョンとディープラーニングを組み合わせることで、この課題を根本から解決するティーチングレス(マスターレス)を実現しています。
- 環境変化に強い3Dセンシング技術: 単なるRGB(カラー)カメラではなく、ToF(Time of Flight)方式やアクティブステレオ方式を用いて、対象物に赤外線パターンを照射し、奥行きや形状を立体的な「点群データ」として捉えます。これにより、物流倉庫特有の「バースのシャッター開閉による急激な外光(西日など)の入り込み」「照明のチラつき」「段ボールと同系色のパレット」といった悪環境下でも、安定した認識精度を保ちます。
- WMSトラブルにも耐えうる自律性: 荷下ろしの都度、事前に箱のサイズや重量をWMSから取得する必要がありません。万が一、ネットワーク障害で上位システムが停止し商品マスターが取得できない状況に陥ったとしても、ロボット自身の目で未知の荷物の形状を即座に判断して作業を継続できるため、ライン全停止という致命的リスクを劇的に下げることができます。
ランダム・混合積みに対応するAIアルゴリズム
物流センターの入荷バースでは、形状も重量も異なる複数種類の段ボールがパレット上に無造作に積まれた「混合積み」で到着することが多々あります。これらを無人で荷降ろしするためには、単に箱の輪郭を認識するだけでなく、高度なAIアルゴリズムによる「物理演算と経路計画(パストランニング)」が求められます。
AIは3Dビジョンが取得したデータを瞬時に解析し、「どの箱から取れば全体の荷崩れを防げるか(把持戦略)」「アームの関節部分が隣の箱や安全柵に衝突しない最適なアプローチ軌道はどれか(干渉回避)」をミリ秒単位で計算します。さらに、現場のKPIに直結するタクトタイム(1個あたりの処理時間)を短縮するため、最先端のシステムではロボットアームが移動して箱をコンベヤに置いている最中に、すでに次の箱の認識と演算を完了させる「パイプライン処理」を行っています。これにより、人間の熟練作業者と同等以上のスピード(1時間あたり600〜800ケース)での連続稼働を可能にしています。
荷物に合わせて進化する「ロボットハンド」の種類
どれほどAIソフトウェアが優秀でも、最終的に荷物に触れるハードウェアである「ロボットハンド(エンドエフェクタ)」が現場の荷姿に適合していなければ、落下事故や商品破損を引き起こします。対象物が標準的な段ボールか、表面に凹凸のある折りたたみ式コンテナ(オリコン)か、あるいは不定形の袋物かによって、最適なハンドの仕組みは異なります。
| ハンドの種類 | 技術の仕組みと特徴 | 得意な荷物・現場での注意点 |
|---|---|---|
| 真空吸着式 | 真空ポンプやエジェクタで陰圧を作り、複数の吸盤(パッド)で天面を吸い上げる方式。AIが箱の重心を計算し、荷物に触れるパッドのバルブだけを開閉させる「流量制御機能」を持ちます。 | 【得意】天面が平坦な段ボール、プラスチックケース 【注意】ガムテープの浮き、通気性の高い穴あき段ボール、再生紙比率が高く表面が脆い段ボールでは「真空破壊(エア漏れ)」が起こりやすく、落下のリスクが伴います。コンプレッサーのエア消費量も考慮が必要です。 |
| メカニカルチャック式(クランプ式) | 荷物の両側面、あるいは底面と側面を物理的な金属板などで挟み込む方式。サーボモーターによるトルク制御で、箱を潰さない絶妙な把持力を自動調整します。 | 【得意】重量物、天面が開いている荷物、結束バンド付きコンテナ 【注意】箱と箱の隙間(クリアランス)がないと爪を差し込めないため、密着した混合積みではAIによる「事前ズラシ動作」が必要になり、タクトタイムが長引く傾向があります。 |
| ハイブリッド式 | 真空吸着とメカニカルチャックを併用。天面を軽く吸着して少し持ち上げ、できた隙間に下からパドルを差し込んで底面を確実に支えるという、人間の両手のような確実な動作を再現します。 | 【得意】重量と形状が完全にバラバラな多品種環境(小売り向けセンターや不定形の袋物など) 【注意】機構が複雑でハンド自体の重量が増すため、ロボット本体の可搬重量(ペイロード)を圧迫します。システム全体のコスト増に直結するため慎重な検討が必要です。 |
自社に最適なシステムを選ぶ!実践的な5つの選定チェックポイント
前章までで解説した高度な制御技術を踏まえ、ここでは「自社の現場にどのデパレタイズロボットを導入すべきか」という、実務に直結する選定基準を解説します。物流自動化の失敗例で最も多いのが、「カタログスペックを鵜呑みにして導入した結果、現場の荷物に対応できず、結局人間が手直ししている」というケースです。投資対効果を最大化するためには、現場のイレギュラーな運用までを想定した解像度の高い選定が不可欠です。
① 対象物の仕様(重量・材質・コンテナ)と目標タクトタイム
デパレタイズロボット導入において、最初に直面する壁が「自社の多様な荷物に対応できるか」です。カタログに記載された「最大可搬重量」をそのまま信用してはいけません。最大可搬重量にはロボットの手先に付くハンドの重量が含まれているため、実質的に運べる荷物の重量はカタログ値よりも数十キロ軽くなるのが実務の常識です。
処理能力を示すタクトタイムについても注意が必要です。カタログ上の「最大800ケース/時」という数値は、理想的な段ボールが整然と積まれている条件下でのテスト値です。実際の現場では、画像認識の演算処理、箱の傾きを補正する動作、荷崩れを防ぐための低速移動などが重なり、実運用では「400〜500ケース/時」に落ち込むことも珍しくありません。自社の要求スループット(時間当たりの処理量)を満たせるか、最悪の条件(最も重い、または最も認識しづらい荷物)を基準にタクトタイムを逆算する必要があります。
② 設置スペースの制約と「協働ロボット」という選択肢
既存の物流センターや工場に後付け導入する場合、ほぼ100%の確率で「設置スペースが足りない」という問題が発生します。従来の産業用ロボットは、労働安全衛生法により周囲を頑丈な安全柵(フェンス)で囲う必要があり、広大なデッドスペースを生み出します。
そこで狭小スペースの救世主として注目されているのが「協働ロボット(Cobot)」を用いたシステムです。協働ロボットは、ISO/TS 15066などの国際安全規格に準拠し、人と接触した際に安全に停止する機能を持つため、安全柵なしで人間と同じ作業エリアに設置可能です。フォークリフトの動線ギリギリの場所や、天井高が低い中2階(メザニン)にも導入できます。ただし、安全性を担保するために産業用ロボットよりも動作速度が制限されるというトレードオフが存在します。「圧倒的スピード重視の産業用ロボットか、省スペース・柔軟性重視の協働ロボットか」は、現場の処理ボリュームと設置環境を天秤にかけて選択します。
③ ロボット単体ではなく「周辺設備」との連携設計
設備担当者が最も陥りやすい罠は、デパレタイズロボットを「単体の点」として捉えてしまうことです。物流自動化は、前後工程を含めた「線」で設計しなければ機能しません。
デパレタイズ工程において重要なのは、「空になったパレットをどうやって自動排出するか」と「降ろした荷物をどの高さ・速度のコンベヤに流し込むか」です。都度ハンドリフトを用いて人が空パレットを交換していては、ロボットの待ち時間が発生し稼働率が下がります。自動パレットチェンジャーや空パレスタッカー、さらにはAGV/AMR(自律走行搬送ロボット)と連携させ、パレットの供給から排出までを完全無人化する全体設計が求められます。
④ 例外処理(エラーハンドリング)とマニュアル動線の設計
現場の実務では、荷物の落下、テープの剥がれ、著しい箱の破損といった「チョコ停(一時的な停止)」が必ず発生します。また、WMSのネットワーク障害によりシステム連携が絶たれるリスクもゼロではありません。このような緊急時に備え、ロボットを即座に安全退避させ、人間が手作業でデパレタイズを代行できる「マニュアル動線」があらかじめ確保されているかどうかが、プロの現場設計です。
さらに、現場の作業員が直感的に操作できるHMI(ヒューマンマシンインターフェース:タッチパネル画面など)の使いやすさも重要です。エラー発生時に専門のエンジニアを呼ぶことなく、現場のパート・アルバイトスタッフでもボタン一つで安全に復旧できる仕組みがなければ、実運用は回りません。
⑤ 保守・メンテナンスとベンダーサポート体制
AI搭載の知能ロボットは、導入して終わりではありません。新しいデザインのパッケージや、これまで扱ったことのない特殊な形状の荷物が増えた際、AIの認識精度をいかに高く保つかが重要になります。ベンダーがクラウド経由で最新のAI学習モデル(推論モデル)を定期的にアップデートしてくれるサブスクリプション型のサービスや、カメラの汚れ・吸着パッドの摩耗を検知して事前アラートを出す予知保全機能の有無、そしてトラブル時の24時間遠隔監視サポート体制(SLA)が提供されているかを必ずチェックしてください。
経営層を説得する「費用対効果(ROI)」と導入コストの考え方
物流センターの自動化プロジェクトにおいて、現場責任者が直面する最大の壁が経営層への稟議です。「重筋作業による離職を防ぎたい」「現場が回らない」という定性的な切実な声だけでは、数千万円規模の設備投資は動かせません。デパレタイズロボットの導入を成功させるには、ロボット本体だけでなく周辺設備を含めた「総導入コスト(CAPEX)」と運用費(OPEX)を正確に把握し、隠れたメリットまでを数値化した緻密なROI(投資対効果)の提示が不可欠です。
デパレタイズシステムの価格相場とコスト内訳
最新の知能ロボットを活用し、マスターレス・ティーチングレスでの稼働を目指す場合、高度な3DビジョンセンサとAIコントローラ、そしてこれらを現場のシステムと統合するSIer(システムインテグレーター)のエンジニアリング能力が不可欠となります。一般的な総導入コストの相場と内訳は以下の通りです。
| コスト項目 | 価格相場(目安) | 現場実務における留意点・変動要因 |
|---|---|---|
| ロボット本体・制御盤 | 500万〜1,500万円 | 可搬重量やアームのリーチ長で変動します。省スペース化のために協働ロボットを選定する場合、安全柵のコストは浮きますが、処理速度の低下による費用対効果の変動に注意が必要です。 |
| エンドエフェクタ(ハンド) | 100万〜300万円 | 段ボール、袋物、樹脂コンテナなど荷姿に応じた特殊設計(特注ハンド)が必要な場合、開発費が跳ね上がります。吸着パッドなどの消耗品ランニングコスト(OPEX)も考慮すべきです。 |
| 3Dビジョン・AIソフトウェア | 300万〜800万円 | 混合積みパレットの認識精度に直結する心臓部です。AIのライセンス形態(買い切りか、クラウド型の月額サブスクリプションか)によって長期的なTCO(総所有コスト)が変わります。 |
| SIerエンジニアリング・周辺設備 | 1,000万〜2,500万円 | 空パレットの排出コンベヤ敷設、安全柵、AGV連携、PLC制御プログラムの構築費。現場固有のレイアウトに合わせたマテリアルハンドリング機器の特殊設計がコストを大きく押し上げる要因となります。 |
| システム連携(WMS/WCS等) | 200万〜500万円 | WMSからの入荷予定データとの照合インターフェース開発費。通信トラブル等によるWMS停止時に、ローカルで単独駆動させるバックアップ機能(フォールバック体制)の構築費もここに含まれます。 |
総額として、1ラインあたり2,500万〜5,000万円規模の投資となります。導入にあたって現場が最も苦労するのは「WMSとの連携」と「異常発生時のリカバリー設計」です。これらを初期段階でSIerと綿密にすり合わせておくことが、導入後の予期せぬ追加開発コストを防ぐ防波堤となります。
人件費削減・労災防止効果を数値化するROIシミュレーション
稟議を通すためのROI計算において、単なる「作業員〇名分の直接人件費削減」だけで勝負するのは得策ではありません。自動化がもたらす真の価値は、採用難易度の緩和と事業継続リスクの回避、そして機会損失の防止にあります。以下のフレームワークを用いて、経営層には見えにくい現場の定性的なメリットを強制的に数値化してください。
- 直接人件費・深夜割増の削減: 1シフトあたりデパレタイズ作業員2名分(例:時給1,500円 × 8時間 × 2名 × 250日 = 年間600万円)。24時間稼働のセンターであれば、深夜割増賃金(25%増)も含め、効果は2.5〜3倍に跳ね上がります。
- 採用・教育コストの削減(機会損失の防止): 荷下ろしなどの重筋作業エリアは定着率が極めて低く、慢性的な人員不足に陥ります。年間を通じた求人広告費、派遣会社への割高なマージン、新人教育に割かれる現場管理者の工数に加え、「人が集まらずラインを稼働できなかったことによる機会損失」を算出し、年間200万〜400万円程度の削減効果として計上します。
- 労災リスクの低減: 腰痛などによる休業補償、労働基準監督署への対応工数、穴埋め人員の緊急確保にかかる割増コスト。過去3年の平均発生率からリスクコストとして算出し、年間100万〜200万円程度に換算します。
- 税制優遇と補助金の活用: 「中小企業経営強化税制」による即時償却や、「省力化投資補助金」などの公的支援制度を活用することで、初期キャッシュアウトを抑え、実質的なROI回収期間を劇的に短縮することが可能です。法定耐用年数に基づく減価償却費とキャッシュフローのシミュレーションを財務部門と連携して作成します。
【ROIシミュレーションの具体例】
総導入コスト4,000万円のシステムを導入し、1日2シフト稼働の現場に適用したと仮定します。
・直接人件費削減:1,300万円/年
・採用/教育/労災/品質改善による間接コスト削減:500万円/年
年間トータルキャッシュフロー改善効果:1,800万円
この試算であれば、約2.2年での投資回収が達成可能です。経営層には「ロボットは有給休暇も突然の欠勤もなく、深夜割増も不要で、荷崩れ寸前の危険なパレットにも平然と立ち向かう最高のスタッフである」という事実を、確固たる数字の裏付けとともに提示してください。
失敗しない物流自動化への導入ロードマップと成功事例
現状分析から要件定義、テスト(PoC)までの確実なステップ
デパレタイズロボットは「導入すれば翌日から人がゼロになる魔法の箱」ではありません。確実な投資対効果を叩き出すためには、現場の泥臭い実務に寄り添った緻密な要件定義と、PoC(Proof of Concept:概念実証)が不可欠です。いきなり設備投資に踏み切るのではなく、以下のステップを踏むことで導入後の混乱を未然に防ぎます。
- ステップ1:徹底した現状分析と「例外処理」の洗い出し
「荷崩れしている場合」「シュリンクラップが巻かれている場合」「想定外のコンテナが混ざった混合積みの場合」など、イレギュラーパターンの発生頻度を計測します。また、後工程のコンベヤラインの処理能力(ラインバランス)を見極め、目標とするタクトタイムを明確に定義します。 - ステップ2:KPIを設定した実負荷PoC(テスト)の実施
自社の最も条件の悪い荷物(柄が複雑な段ボール、透明なシュリンク包装、重力で変形する袋物など)を実際にロボットメーカーのラボへ持ち込み、テストを実施します。ここで重要なのは「認識成功率99%以上」「把持成功率99.5%以上」といった明確なSuccess Criteria(成功基準)を設け、マスターレス技術が実用に耐えうるかを厳しく評価することです。 - ステップ3:WMS連携設計とフォールバック体制の構築
ロボット単体ではなく、WMSやWCSとのデータ連携を設計します。上位システムがダウンした際のローカルモードへの切り替え手順や、人がすぐ隣で手動リカバリー作業を行える安全設計を必ず組み込みます。
DX推進時の組織的課題とチェンジマネジメント
最新のテクノロジーを導入する際、見落とされがちなのが「現場の反発」という組織的課題です。現場作業員は「ロボットに仕事が奪われるのではないか」「エラーばかりで結局自分たちの手間が増えるのではないか」という不信感を抱きがちです。これを解消するための「チェンジマネジメント」がプロジェクト成功の鍵を握ります。
導入前から現場のキーマンをプロジェクトに巻き込み、「ロボットは重くて辛い作業を代行してくれる”相棒”であり、人間はより付加価値の高い管理・判断業務へシフトする」という明確なビジョンを共有します。また、ロボットの操作やエラー解除の方法を早期にレクチャーし、機械に対する恐怖心や抵抗感を払拭する教育カリキュラムを計画的に実施することが、早期の稼働安定化に直結します。
【業界別】食品・化学・物流センターでのデパレタイズ成功事例
事前の綿密なPoCと現場の理解を経て、実際に過酷な現場で稼働している成功事例を紹介します。業界ごとに求められるスペックの違いや、現場課題の解決アプローチに注目してください。
| 業界 / 施設環境 | 導入前の課題(現場のリアルな悩み) | 導入されたシステム構成 | 導入効果のポイント |
|---|---|---|---|
| 大手食品工場 (飲料・調味料) |
・極端に狭い既存ラインへの後付け設置 ・サニタリー(衛生)要件のクリア ・多品種少量生産による段取り替えの負担 |
・省スペース型協働ロボット ・IP67対応の防塵・防水ハンド ・ティーチングレス対応3Dビジョン |
安全柵なしで導入でき、フォークリフトの動線を維持。新商品の追加時もマスターレス技術により事前の登録作業が不要となり、生産技術部門の負担が激減。 |
| 化学・日用品メーカー (液体洗剤・原料) |
・20kgを超える液体の重筋作業による腰痛 ・重心が偏るボトル入り段ボールの荷姿 ・混合積みパレットからの荷下ろし |
・高可搬(50kg対応)産業用ロボット ・偏重心に対応する流量制御付き吸着ハンド ・物理演算エンジン搭載のAIシステム |
作業員の腰痛・労災が実質ゼロに。AIが箱の隙間やテープの反射を正確に見分け、把持ミスによる液漏れ事故やライン停止を完全に防止。 |
| 大型物流センター (3PL・リテール) |
・毎日入荷する未知の段ボールサイズ ・ソーターへ投入する超高速のタクトタイム ・折り畳みコンテナ(オリコン)の混在 |
・超高速デパレタイズ専用機 ・ディープラーニング搭載3Dビジョン ・WCSと直結したコンベア同期制御 |
1時間あたり600ケース以上の驚異的なタクトタイムを実現。未知の段ボールとコンテナが混在してもロボットが瞬時に把持戦略を計算し、完全無人化を達成。 |
これらの事例からわかるように、扱う荷物の特性や現場の制約によって、選ぶべきロボットの機構やビジョンセンサーの性能、そして運用設計は大きく異なります。「とりあえず最新のAIロボットを導入すれば解決する」という安易なアプローチは現場に無用の混乱を招きます。自社の荷姿特性を深く理解し、人とロボットが協調する全体最適のプロセスを描き出すことこそが、物流自動化の成否を分けるのです。
よくある質問(FAQ)
Q. デパレタイズロボットとは何ですか?
A. デパレタイズロボットとは、パレットやカゴ車から荷物を降ろす「荷下ろし(デパレタイズ)」工程を自動化するロボットのことです。これまで人の手に依存していた重労働を自動化することで、物流センターにおける入荷時のボトルネックを解消します。物流2024年問題におけるトラックの待機時間削減や、深刻な人手不足への対策として導入が急増しています。
Q. デパレタイズとパレタイズの違いは何ですか?
A. パレタイズが荷物をパレットに「積み上げる」作業であるのに対し、デパレタイズはパレットから荷物を「降ろす」作業を指します。パレタイズは規則的に積むことが多いため自動化が先行していましたが、デパレタイズはランダムな積み方に対応する必要があり難易度が高い工程でした。近年はAIや3Dビジョンを搭載した知能ロボットにより、デパレタイズの自動化が可能になっています。
Q. デパレタイズロボットを導入するメリットは何ですか?
A. 最大のメリットは、従業員を過酷な重筋作業から解放し、現場の人手不足を解消できる点です。最新のロボットは3DビジョンとAIを搭載しており、事前の設定が不要な「ティーチングレス」でランダムな混合積みにも対応します。これにより、トラックの待機時間が削減されるだけでなく、コンベヤなどの周辺設備と連携することで物流センター全体の生産性が大幅に向上します。